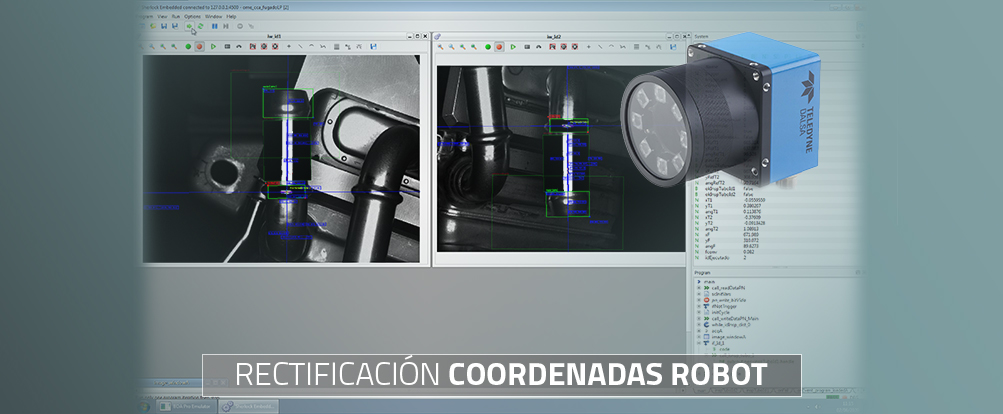
Inicialmente el robot coge la pieza y la lleva a un marcador laser para grabar una marca para indicar donde el operario tiene que insertar una pieza. El problema en este proceso viene de la pieza, la zona de marcado está en una parte de la pieza que tiene cierto desplazamiento, por lo que la marca en ocasiones se sale de las tolerancias adminitidas de marcado. Para resolver el problema se ha instalado en la máquina una cámara Boa Pro para poder corregir las desviaciones. La cámara Boa Pro es una cámara inteligente con una versión del programa Sherlock. Se han realizado dos aplicaciones, una de calibración y otra de inspección. La cámara comunica con el Robot a través del PLC de la línea con un protocolo desarrollado a medida entre la cámara, el PLC y el Robot. La aplicación de calibración sirve para comprobar que la cámara no se ha movido o modificado su posición. Con una programación configurada el PLC carga la tarea de calibración, en la que el Robot presenta a la cámara una pieza calibrada en la que se determina que las medidas y posiciones no han variado. El programa de corrección busca en la imagen la zona de marcado y calcula la posicición en la que debería estar. Una vez obtenida la diferencia de coordenadas 2D se las pasa al Robot para que corrija la posición de marcado con respecto a un plano.